摘要:介绍了几种吊链式
抛丸清理机的特点,针对目前人工装卸工件现状,研发了6自由度关节机器人、 滚珠丝杠移动工作台和工件测量定位系统等,保持机器人与吊链同步移动,机器人底座相对吊链静止时悬挂工 件,避免了工件与吊钩发生碰撞或干涉现象。
关键词:吊链;抛丸清理机;工件;吊钩;机器 中图分类号:TG23 文献标识码:A 文章编号:1674—6694(2014)
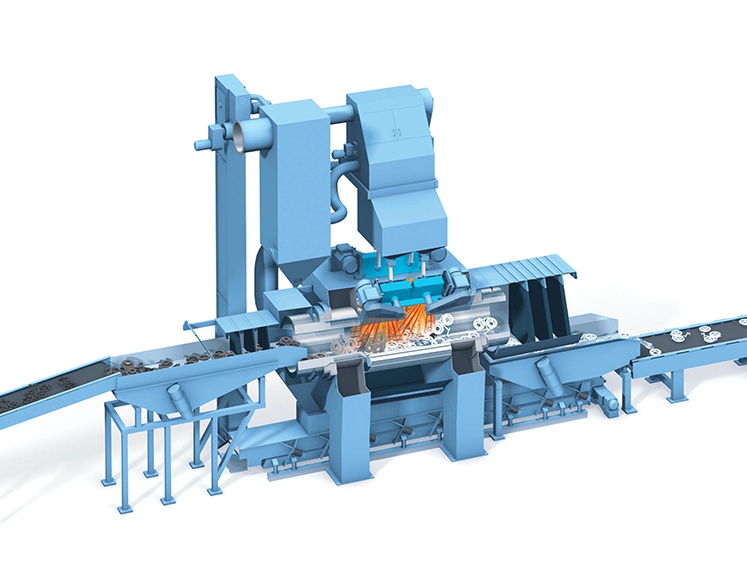
抛丸清理机按吊链式抛丸清理机的吊链行走 方式不同,可分为吊链连续式、吊链步进式和积放式抛丸清理机。吊链连续式抛丸清理机的吊链连续 匀速行走,工件在随吊链行走的过程中完成装上、 抛丸清理、卸下等工序,该抛丸清理机连续作业,生 产效率高,适应性广,但每钩清理时间不可调节,如 图1所示;吊链步进式抛丸清理机的吊钩脉动前 进,一步一钩或多钩,工件在装卸区和抛丸区分别 处于停止状态,实现定点装卸和定点抛丸工序,该 抛丸清理机装卸和抛丸时问可调,生产灵活性强, 提高了弹丸利用率和生产效率,缺点是不如连续式 生产效率高;积放式抛丸清理机的吊钩采用积放链 输送,吊钩在不同区段行走速度不同,吊链在抛丸 区内停留时间和装卸工件时间可灵活调整,以方便 装卸工件和提高抛丸清理效率,操作灵活性大,对 于发动机缸体缸盖、电机壳体表面及内腔较复杂的 工件,清理效果尤为突出。
吊链式抛丸清理机的工件吊挂在连接吊链的 吊钩上,工件相互之间不接触,并间隔一定的距离, 工件各表面暴露在外,钢丸可以直接抛打在工件表 面上,抛打效果好,清理时间短,生产效率高。上述 三种形式的吊链式抛丸清理机都适合各种批量、不 同复杂程度的中等铸件、锻件、合金件等表面上的 残砂、夹杂、氧化皮和铁锈的清理,自动化程度和生 产效率高,清理效果好。
1工件装卸现状
无论哪种形式的吊链式抛丸清理机,其工件的 装卸都是在抛丸清理室外某一位置进行。目前清理 稍大一些的工件是采用人工操作电葫芦或行车装 卸,对于中等工件(如几十公斤重的工件)是采用人 手搬运装上或卸下,由于吊钩一般吊在吊链上,并 位于地面一定的高度,搬运工人需要将工件举升到 相应高度进行装卸,长时间工作会造成工人劳动强 度大,生产效率低,对工人的身心造成一定的伤害, 所以人工装卸难以满足高速、自动化生产线的要
2工件自动装卸
针对吊链式抛丸清理机人工装卸工件的现状, 研发了吊链装卸工件机器人系统,考虑到吊链通过 式抛丸清理机的吊钩是连续匀速移动的,所以研发 的吊链装卸工件机器人系统由6自由度关节机器 人、滚珠丝杠移动工作台和工件测量定位系统等三 部分组成。
2.1 6自由度关节机器人用来装卸搬运工件。6自由度关节机器人装在滚珠丝杠移 动工作台上,滚珠丝杠副带动机器人直线移动,用 来保持机器人与吊链同步移动的状态下装卸工件, 避免工件与吊钩发生碰撞或干涉现象,工件测量定 位系统用来将输送来的工件进行准确定位,为机器 人装卸工件做好准备。
2.16自由度关节机器人的研发
6自由度关节机器人运动灵活、位置准确、装卸 速度快,特别适合中等工件的装卸搬运。研发的6 自由度关节机器人较大装卸质量为50 kg,机器人 由6台伺服电机和6台减速机组成,分别控制6个 关节的运动。机器人本体的主要零部件,如底座、腰 部、大臂、小臂、腕部等采用铸件精加工而成,腕部 部分零件采用铸铝合金材料,减轻了腕部重量和大 小臂承受的力矩,提高了机器人的承载能力。课题 组对机器人结构进行了三维建模和优化,研发了机 器人控制系统,开发了控制系统软件,进行了机器 12人运动学和动力学分析。
2.2滚珠丝杠移动工作台的开发
对于吊链连续杏宇抛丸清理机,工件连续匀 速移动,机器人机座静止、各关节转动悬挂工件,容 易发生工件与吊钩碰撞现象。为保持机器人与吊链 同步移动,课题组开发了滚珠丝杠移动工作台,采 用伺服电机驱动丝杠转动,带动螺母和工作台移 动,机器人装在工作台上随着一起移动。将滚珠丝 杠驱动系统、吊链控制系统与机器人控制系统连接 在一起,就实现了整个系统的控制。工作台底座采 用铸件制造而成,滚珠丝杠副和滚动直线导轨副等 零部件外购,经过安装和调试完成了滚珠丝杠移动 工作台的开发。
机器人要将工件准确放置到吊钩上,需要“知 道”工件的形状和位置,课题组分析研究了各种工 件的形状,针对不同形状的工件采用相应的测量和 定位方法。对于发动机缸体、缸盖类的长方体工件 采用辊道输送,工件压下行程开关,辊道停止转动, 工件到达前定位面,侧面气缸推动工件到达另一定 位面,工件在两个相互垂直的定位面上进行定位, 松开气缸后工件就可以被机器人抓走。对于其他形 状的工件,采用机器视觉技术,用双目相机进行视 觉定位,然后进行图像处理和识别定位,较后传送 给机器人控制系统进行抓取工件。
2.3工件搬运夹持器
吊链式抛丸清理机清理的工件形状多种多样, 机器人的末端夹持器要能够准确有效地夹持和搬 运工件,到达位置后快速卸下工件。课题组研发了 发动机缸体缸盖夹持器、圆柱形工件搬运夹持器、 薄板电磁吸盘夹持器和三通阀门搬运夹持器等。圆 柱形工件搬运夹持器采用三个径向均布的气缸完 成对工件的夹紧,如图 a)所示;对于薄板类工件 采用电磁吸盘吸住工件;对于铸铁件三通阀门采用三个卡爪分别勾住三个孑L、中间杆顶住阀门体,完 成对三通阀门的定位夹紧,如图 b)所示。

a)圆柱形工件夹持器 b)三通阀门夹持器
图4工件搬运夹持器
3结束语
吊链式抛丸清理机适合于各种批量、不同复杂 程度的中等铸件、锻件、合金件等工件表面的清理, 目前工件的输送和抛丸清理都已实现自动化,但将 工件装到吊钩上和从吊钩上卸下还是由人工完成, 工人的劳动强度大,装卸时间长,生产效率低,不适 合高速、大批量生产。本文提出了在吊链式抛丸清 理机上采用机器人装卸工件的思想,将机器人装在 滚珠丝杠移动工作台上,保持机器人与吊链以相同 的速度移动悬挂工件,机器视觉检测和定位工件, 研发的吊链装卸工件机器人系统,经在吊链式抛丸 清理机上装卸工件应用,效果良好,满足生产的要 求,减轻了工人的劳动强度,提高了生产效率和自 动化水平。
参考文献:
〔1〕王守仁,翟永真.浅谈铸件清理过程中的抛丸清理设备〔J〕.机械 工业标准化与质量,2011(11):46-49. 〔2〕徐金成,范俊生,王瑞国,翟永真,等.铸件清理设备的发展历程 及现状〔J〕.中国铸造装备与技术,2012(2):28—32. 〔3〕张利欣,尹德秀,张利舰械手
抛丸机在铸件清理中的应用与改 进〔J〕.铸造设备与工艺,2010(2):8—10. 〔4〕阎学成.0485型500 kg步进吊链抛丸清理机的设计、试制与应 用〔J〕.铸造设备研究,1995(2):39-43.